Problème
Projeter des variantes RefLignes construites au lieu de référence, sur une infra à la voie, en combinant des variantes tirées d'Agathe (pour les cas où on ne trouve pas de variante bout en bout.)
Modélisation
Problème de flot à coût minimum dans un graphe. On construit un graphe orienté, avec un noeud par pr-voie et un (ou plusieurs) arc entre deux noeuds s'il existe un itinéraire entre ces pr-voies. On peut mettre un coût sur chaque arc, correspondant à la longueur de l'itinéraire, (ou autre chose)
On ajoute une source, liée à tous les pr-voies du premier PR de la variante qu'on souhaite projeter, et un puit, lié à tous les pr-voies du dernier PR de la variante qu'on souhaite projeter.
On va obliger une unité de flot à sortir de la source et une unité à rentrer dans le puit. L'optimiseur va nous trouver (s'il existe) le meilleur chemin entre la source et le puit.
Variables
Il y aura une variable par arc, qui vaudra 1 si cet arc est emprunté, 0 sinon.
Ci-dessous, on les note <o>_<d>, ou <o> et <d> correspondent respectivement au noeud origine et destination de l'arc.
Fonction objectif
On souhaite minimiser le coût total, coût obtenu en multipliant le coût d'emprunt d'un arc par la valeur de la variable qui représente l'emprunt de cet arc.
Contraintes
Quantité de flot
Il faudra qu'exactement une unité parte de la source. La somme des variables représentant les arcs sortants de la source = 1. Même principe, à l'inverse, pour le puits.
Dans l'exemple ci-dessus, ça donne:
s_a1 = 1;
e1_p + e2_p = 1;
Conservation du flot
À chaque noeud, il faudra que le nombre d'unités entrantes = le nombre d'unités sortantes. Si un arc qui mène vers un noeud est epmrunté, un arc qui sort de ce noeud devra être emprunté.
Par exemple: a1_b2 = b2_c2 + b2_c3;
Nombres entiers
Duh
Imposition de passage par certains PR
Dans le graphe qu'on a vu jusqu'à maintenant, la seule solution possible passe par tous les PR.
Si on rajoutait un lien direct C3 -> E2, on pourrait trouver une solution qui ne passe pas par D.
Dans un tel cas, si on souhaite imposer des points intermédiaires, on peut imposer une quantité de flot entrant ou sortant à certains PR.
Par exemple: c1_d1 + c2_d1 = 1
Implémentation Excel
Voir ce classeur
C'est super pour faire un POC rapide. Mais la dernière fois que j'ai vérifié, on était limité à 100 variables dans le solveur gratuit Excel. On atteint assez vite ce nombre avec de gros graphes.
Implémentation lp_solve
C'est l'occasion d'enfin tester lp_solve http://lpsolve.sourceforge.net/5.5/
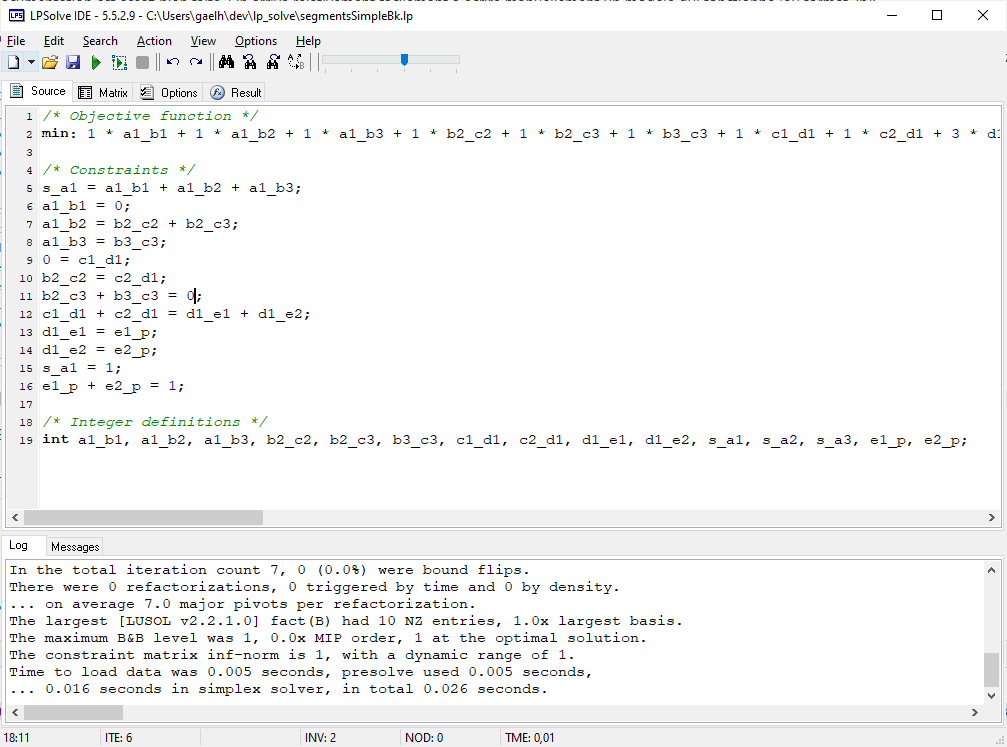
La documentation est assez bien faite. On arrive relativement facilement à écrire manuellement un modèle qui fonctionne (au format .lp):
/* Objective function */
min: 1 * a1_b1 + 1 * a1_b2 + 1 * a1_b3 + 1 * b2_c2 + 1 * b2_c3 + 1 * b3_c3 + 1 * c1_d1 + 1 * c2_d1 + 3 * d1_e1 + 2 * d1_e2 + 0 * s_a1 + 0 * s_a2 + 0 * s_a3 + 0 * e1_p + 0 * e2_p;
/* Constraints */
s_a1 = a1_b1 + a1_b2 + a1_b3;
a1_b1 = 0;
a1_b2 = b2_c2 + b2_c3;
a1_b3 = b3_c3;
0 = c1_d1;
b2_c2 = c2_d1;
b2_c3 + b3_c3 = 0;
c1_d1 + c2_d1 = d1_e1 + d1_e2;
d1_e1 = e1_p;
d1_e2 = e2_p;
s_a1 = 1;
e1_p + e2_p = 1;
/* Integer definitions */
int a1_b1, a1_b2, a1_b3, b2_c2, b2_c3, b3_c3, c1_d1, c2_d1, d1_e1, d1_e2, s_a1, s_a2, s_a3, e1_p, e2_p;
L'IDE qui est l'option la plus facile à trouver dans les downloads est assez pratique. On écrit un modèle dans l'onglet source.
Puis on appuie sur "play" et on a le résultat:
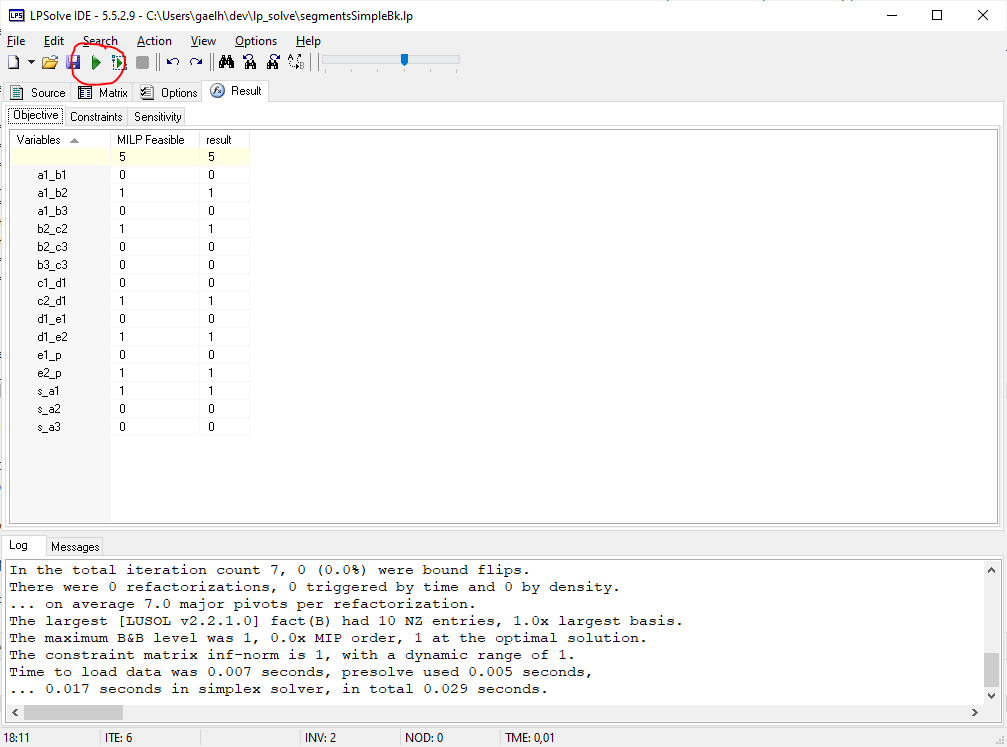
On peut convertir notre modèle en d'autres formats: ça pourrait être pratique pour le tester avec d'autres solveurs.
Il faut chercher un peu plus pour trouver le download qui contient l'exécutable en mode CLI : https://sourceforge.net/projects/lpsolve/files/lpsolve/5.5.2.9/lp_solve_5.5.2.9_exe_win64.zip/download
Il contient, entre autres, un lp_solve.exe
On lui passe un nom de fichier .lp, éventuellement un nom de fichier où envoyer la sortie:
.\lp_solve.exe .\exemple.lp > output.txt
Et on obtient un fichier contenant le résultat:
Value of objective function: 5.00000000
Actual values of the variables:
a1_b1 0
a1_b2 1
a1_b3 0
b2_c2 1
b2_c3 0
b3_c3 0
c1_d1 0
c2_d1 1
d1_e1 0
d1_e2 1
s_a1 1
s_a2 0
s_a3 0
e1_p 0
e2_p 1
On peut ajouter des paramètres -S1 à -S7 pour avoir plus ou moins de détails dans la sortie (valeurs des contraintes avec -S3 par exemple).
.\lp_solve.exe .\exemple.lp -S3 > output.txt
Il ne semble pas y avoir d'autres formats de sortie plus "faciles" à parser.
Implémentation Node.js
À venir:
- Générer le modèle et l'exporter en format .lp
- générer les arcs: soit à partir de "variantes" agathe ou de variantes Hastus
- soit directement à partir de l'infra Agathe, en récupérant les segments et les node ids associés aux différentes voies
- Appeler lp_solve.exe en lui passant le fichier .lp
- Récupérer et parser le fichier de sortie
Modélisation alternative
Un simple plus court chemin avec Djikstra pourrait aussi suffir.
- On doit quand même ajouter le puit et la source, pour représenter les PR origine et destination sans préjuger d'une voie de départ ou d'arrivée
- On ne peut pas utiliser des contraintes de flot pour forcer le passage par certains groupes de noeuds. On va plutôt gérer ces contraintes dans la génération du graphe, en ne générant que les arcs qui respectent certains critères
- sachant que:
- on veut absolument passer par D
- D n'est accessible que depuis C
- on élimine tous les arcs qui vont de C vers autre chose que D
- sachant que:
- Ça oblige à:
- générer un graphe différent pour chaque problème
- avoir une bonne connaissance de la topologie du réseau au moment où on génère le graphe (Savoir que D n'est accessible que depuis C n'est pas nécessairement évident.)
J'ai l'impression que le modèle par flot à cout minimum est plus puissant:
- On peut générer un seul graphe pour une zone donnée
- Un ensemble de contraintes de base qui ne changent pas
- Ajouter queqlues contraintes pour chaque cas précis
Il me semble aussi qu'il permet plus facilement qu'un Djikstra d'ajouter d'autres types de contraintes ou de coûts
- Par exemple, on pourrait définir que les arcs appartiennent à un ou plusieurs groupes de voies, et mettre des contraintes sur le nombre maximal ou minimal d'arc de chaque groupe qui peuvent être empruntés
- Exemple de l'exemple: avoir un groupe d'arcs "voie 1", un groupe d'arcs "voie2", un groupe "jonction entre 1 et 2", et on autorise au maximum 2 arcs du groupe "jonction", pour avoir des itinéraires les plus directs possible